
Dr Fumiya Iida, Department of Engineering
Research Overview
The research interests of the Bio-Inspired Robotics Lab lie at the intersection of robotics and biology. Through abstraction of the design principles of biological systems, we develop core competences which are the design and control of dynamic mechatronic systems, bionic sensor and actuator technologies, and computational optimization techniques. Our main goals are to contribute to a deeper understanding of adaptivity and autonomy of animals through the investigation of dynamic robots, and to engineer novel robotic applications which are more adaptive, maneuverable, resilient, and energy efficient. Currently our research focus is centered around "modeling of biological systems" (mathematical formulations of animals' adaptive behaviors), "self-organization" (mechanisms to generate structures and patterns), and "component development" (development of unconventional enabling technologies such as sensors, motors, computation algorithms and assembling technologies). By understanding the basic design principles of these technological components, we aim to deepen our understanding of self-organization processes of intelligent adaptive behaviors in animals and machines.
Ongoing Research Areas
| Thermoplastic Adhesives in Robotic Locomotion and Manipulation |
|
 |
Description: Robotic growth and morphological change will increase the adaptability of a robotic system facing unanticipated task-environments. The research area focuses on development of mechanisms for robotic growth and morphological change based on Thermoplastic Adhesives (TPAs), also known as ‘hot glue'. TPAs are economic, off-the-shelf, and they have several interesting properties. They can form flexible or rigid structures by means of existing fast-prototyping techniques and can be also used as an easy and strong connection mechanism, which are important technologies towards robotic growth and morphological change. Researchers: Liyu Wang, Luzius Brodbeck, Derek Leach, Utku Culha, Fumiya Iida, Surya G. Nurzaman, Keith Gunura Publications: I. Dragline-forming mobile robots: Bioinspiration and Biomimetics (in press), IROS 2013 II. Reconfigurable manipulation: IEEE/ASME-TMECH, BioRob 2012, ICRA 2012, IROS 2012 III. Vision-based active sensing: PLOS ONE IV. Robotics education: ARSO 2013 (in press) Media coverage: Daily Mail, NBC News, Popular Science, New Scientist, RSI Channel, IEEE Spectrum, ETH Globe Magazine Videos: Continuous dragline formation, assembly |
| Emergence of Reflexive Behavior: a Developmental Approach |
|
 |
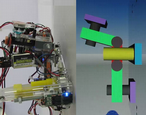
Description: Developmental robotics is located at the intersection of developmental sciences and robotics. The main goal of this field of research is to investigate how a creature can develop increasingly complex behaviors autonomously. In this particular project we use self-organization principles to develop reflexive behavior in a simulated leg model. Using the same self-organization principles, we have obtained analogues of the myotatic, the reverse myotatic, the reciprocal inhibition, and the withdrawal reflexes, which have been identified in the mammal spinal chord. Researchers: Hugo Gravato Marques Publications: Current Biology, Biological Cybernetics Videos: Reflex Learning and Jumping |
| Legged-Locomotion and Unconventional Actuators |
|
 |
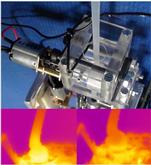
Description: Variable stiffness and damping mechanisms can increase versatility and efficiency of legged locomotion. This research area focuses on the development of lightweight, powerful and simple variable actuators. A number of different methods and materials are explored in the development process of legged robots such as carbon fibers and glass fibers for springs, variable stiffness mechanisms, non-linear springs and passive mechanisms as well as brakes and clutches to create multi modal actuators. Researchers: Fabian Günther, Derek Leach Publications: IROS 2013, IEEE/ASME-TMECH, IROS 2012, IROS 2012, AMAM 2011 Videos: Preloaded Hopping with ETHop and LMMA, Open loop Hopping with ETHop, Double Pendulum |
| Energy Efficient Legged Locomotion Based on Free Vibration |
|
 |
Description: During free vibration process, potential and kinetic energy are exchanged without energy loss. Based on this property, this project aims to design robots with energetically efficient locomotion. The elastic curved beam is demonstrated to perform well using free vibration in the experiment. Due to different design of structure, multiple locomotion gaits including hopping, walking and running, can be achieved. Furthermore, a number of models and simulation are used to investigate the dynamics of robot, which supplies the theory to explore optimal control methods. Researchers: Xiaoxiang Yu, Fabian Günther, Surya Nurzaman Publications: TMECH, ALife, TIE, ICRA 2013, IROS 2012, AIM 2012, AIM 2011, AMC 2012, AMAM 2013, Dynamic Walking 2012, ICMC 2011 Videos: Curved beam robots: Hopper, Walker, Runner Multi-gaited study: simulation, experiment Mini efficient robot: Hopper, Runner Large payload efficient robot: 10kg payload hopper Resonance Vibration, Passive Hopping, Hopper modeling, Curved foot hopper |
| Assistive Mechatronic Posture Support |
|
 |
Description: Using passive and low energy components the goal of this project is to develop a power efficient and comfortable posture support device which allows the user to stand for long periods of time as well as walking and climbing stair. The device absorbs the body weight of the user and redirects it away from the knee. This reduces the stress on the knees and muscles and therefore the risk of pain and injuries. The device is equipped with a high performance variable hydraulic damper. The damping can be varied from very low to very high damping and ultimately brake. The control of this damper allows different applications of the device in the industrial, rehabilitation and medical field. Researchers: Bryan Anastasiades, Keith Gunura |
Previous Projects
| Large-Payload Climbing Robots for Complex Vertical Environments |
|
 |
Description: Robotic climbing in complex vertical environments has been a challenge, especially when the irregularity in the environment is with a close dimension to a robot itself. The project proposed a robotic climbing technology based on thermoplastic adhesives, with whom a physical process of thermal bonding helps increase the adhesion strength, and whose rheological property enables conforming to large-scale irregularities in complex environments. Researchers: Liyu Wang, Fumiya Iida BSc and MSc students: Lina Graber, Remo Bernet, Fabian Neuschaffer, Marc Osswald Publications: IEEE-TRO, RAS, IROS 2011, ICRA 2012, IROS 2012; Media coverage: New Scientist, UPI News, Discovery Channel, Focus Magazine, IEEE Spectrum Videos: A flat surface, complex environments, a large payload |
| MR ESS (Energetically Self Sufficient) |
|
 |
Description: Autonomous mobile robots must be able to deal with the various uncertainties that emerge from the interaction with the real world. Thus the estimation of unmeasurable state variables from measurable ones, is a required cognitive process that permits adaptive robots to successfully overcome the various challenging problems derived. This project aims at finding the binding between the physical and the mental simulation dynamics. Was named mental simulation the from us developed computational strategy. Researchers: Liyu Wang, Fumiya Iida BSc and MSc students: Kevin Frey, Rohit Vaish, Cristian Montillo Media coverage: NZZ Campus Magazine Videos: Q Learning, 'Mental Simulation' |
| Simulation of Multi-Mode Linear Actuator (MMLA) |
|
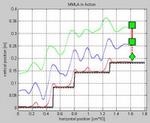 |
Description: Legged locomotion on rough terrain is a demanding task which requires both the mechanical design and the control of a system to be versatile and adaptive. Based on a prototype of a Multi-Mode Linear Actuator (MMLA), this project aims at developing a model-based predictive control algorithm which enables the MMLA to cope with different ground references such as stairs, hurdles and pitfalls. [Video] |
| Self-Sufficient Legged Robot in Uncertain Environment |
|
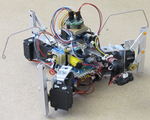 |
Description: Previous projects on self-sufficient mobile robots have shown that dealing with uncertainties of the real world is a challenging problem. This project focuses on efficient approaches applicable in real world scenarios with the objective of finding practical behavior to cope with uncertainties where classical approaches such as simulations fail. In a first step a simple self-modeling approach has been used to find gait patterns for forward locomotion and rotation. Augmentation of two cheap sensors - a proximity and beacon sensor - have shown satisfactory navigation behavior towards the charging station in a simple environment. Videos Learning: [low - high] Navigation: [low] |
| Compass Gait Robot Locomotion in Rough Terrain |
|
 |
Description: The challenge of this project is to develop a controller with which the compass gait robot can walk through a series of steps and gaps on the ground. [video] (Massachusetts Institute of Technology, USA) |
| Optimization of Motor Control in Underactuated Legged Locomotion |
|
 |
Description: This project investigates mechanical designs and optimization processes of legged robot systems, which can traverse rough terrains. [video] (Massachusetts Institute of Technology, USA) |
| Human-like biped locomotion |
|
 |
Description: This project explores the underlying mechanisms of human locomotion by using a biped robot with compliant legs. [video] (University of Jena, Germany) (Funded by the German Research Foundation (DFG, SE1042)) |
| Sensing through body dynamics |
|
 |
Description: The use of body dynamics can be used for the perception of sensory systems. We challenging how the perception, control, and body dynamics are related each other [video] (University of Zurich, Switzerland) (Funded by the Swiss National Science Foundation, Grant No. 200021-109210/1) |
| "Cheap" underwater locomotion |
|
 |
Description: Material properties of body influence significantly underwater for the purpose of locomotion. In this project, we investigate how much behavioral diversity can be achieved through the minimum control and actuation. [video] (University of Zurich, Switzerland) (Funded by the Swiss National Science Foundation, Grant No. 200021-109210/1) |
| Puppy: Cheap rapid legged locomotion |
|
 |
Description: This project investigates musculoskeletal models for rapid four-legged locomotion. The coordination of rigid and elastic structures results in a form of running behavior with simple control architecture. [video] (University of Zurich, Switzerland) (Funded by the Swiss National Science Foundation, Grant No. 200021-109210/1) |
| Stumpy: Pendulum driven hopping machines |
|
 |
Description: By considering morphological properties, we show that human-like behavioral diversity can be achieved only with simple control and actuation. [video] (University of Zurich, Switzerland) |
| Biological inspired 3D visual navigation |
|
 |
Description: Bees have sophisticated visual sensory systems for the purpose of navigation. By using an omni-directional vision which reproduces the perspective of animals, we attempt to model the cognitive function which enables the learning process of navigation. (University of Zurich, Switzerland) (Funded by the Swiss National Science Foundation, Grant No 2000-061372.00) |
| Active non-verbal interaction of Face Robot |
|
 |
Description: Face Robot is capable of exhibiting a variety of facial expression by using the artificial muscles. We investigate how the non-verbal communication between human and machine can be possible through facial expression. (Science University of Tokyo, Japan) |
- * Fumiya Iida
- Computer Vision & Robotics Group
- Overview
- Members
- Research
- Teaching
- Publications
- Events and Seminars
- 4th Year Projects
- Postgraduate Applications
- Contact
- Machine Intelligence Homepage