
Dr Fumiya Iida, Department of Engineering
Robots
 10kg Hopper Video |
 3 Mass Model Video |
 Soft Robotics Tutorial Video |
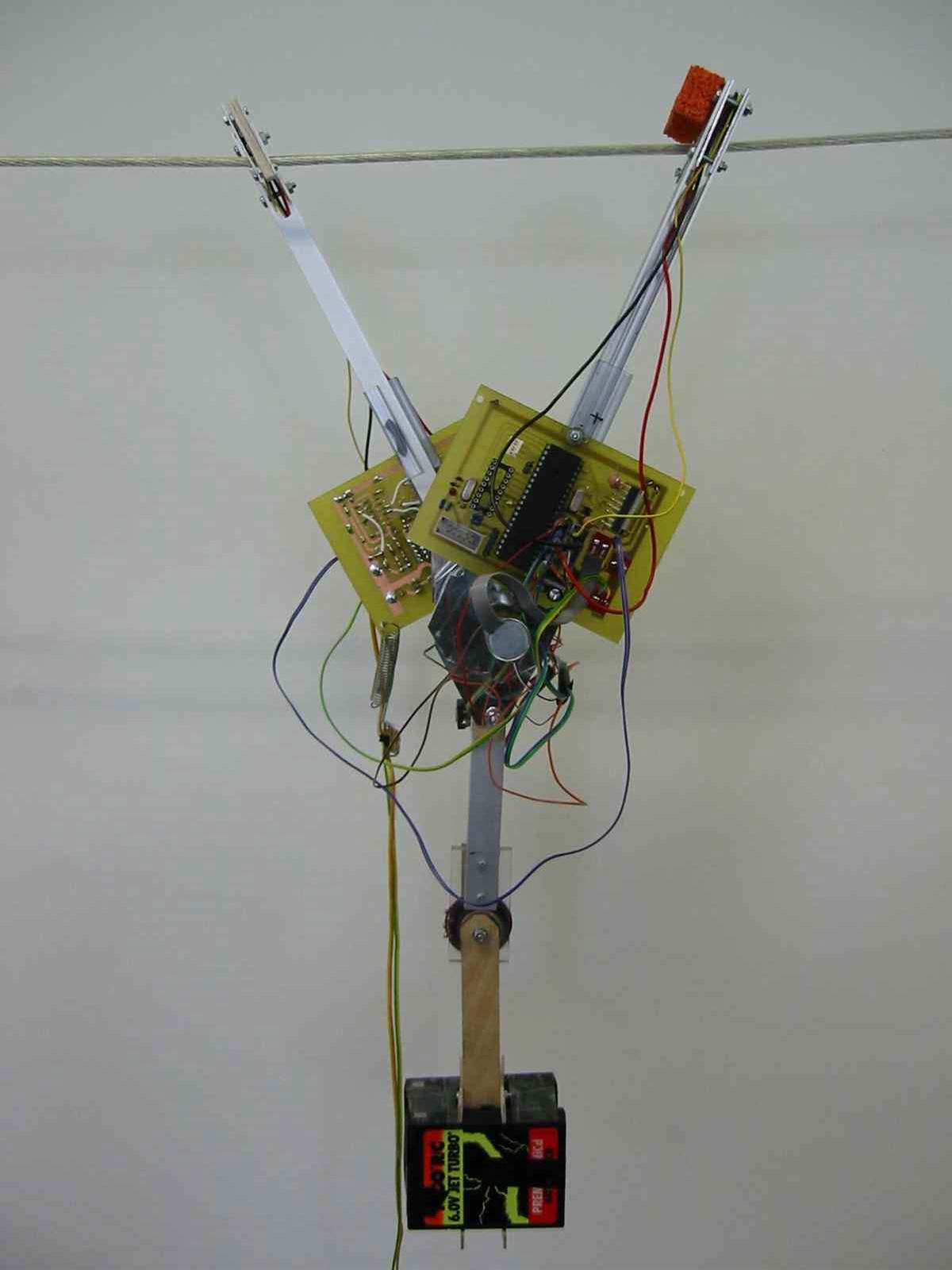
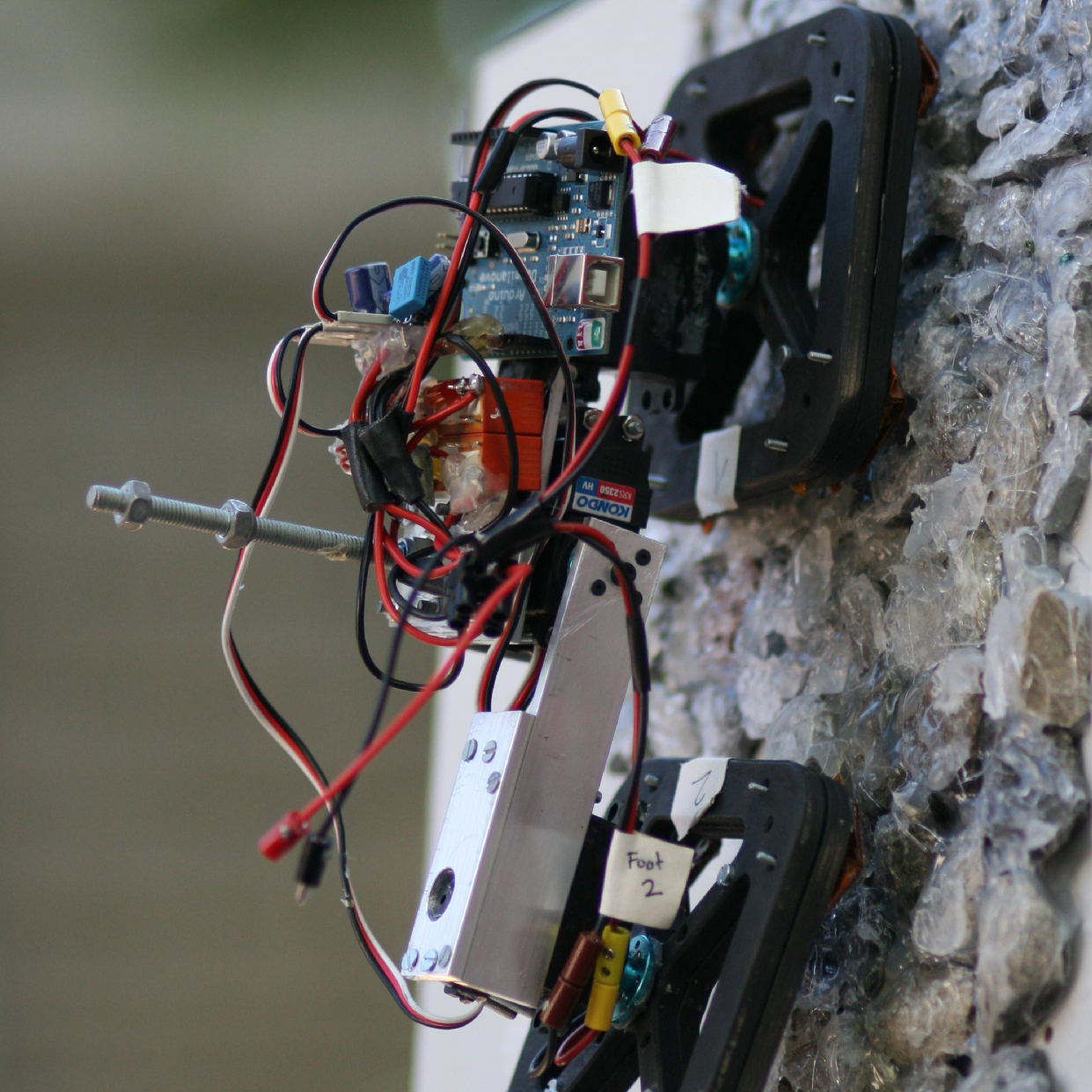 HMA Climber III Video 1 Video 2 |
 Dragline Spider Video 1 Video 2 |
 Robotic Body Extension II Video |
 Automatic Design and Assembly |
 LMMA Video |
 Mini Runner Video |
 Robotic Body Extension Video |
 Double Pendulum |
 Multi-Gaited Robot Simulation Experiment |
 22-Robot Video |
 Kanga-2 Video |
 Mini Hopper Video |
 Curved Beam Hopper Video |
 Curved Beam Runner Video |
 Curved Beam Walker_Hopper Video |
 ETHOP Video |
 3rd Arm II Video |
 HMA Climber I Video |
 HMA Climber II Video |
 HMA Manipulator Pick-Place Assembly |
 PassiveHop-0 Video |
 2-Beam-Mirror Robot Video |
 HMABrake |
 Multi-Mode Actuator Video |
 Three-Mode Actuator Video |
 Glue Worms Video |
 BA_leg |
 Glunipulator Video |
 Monomo Video |
 ZMD3 Video |
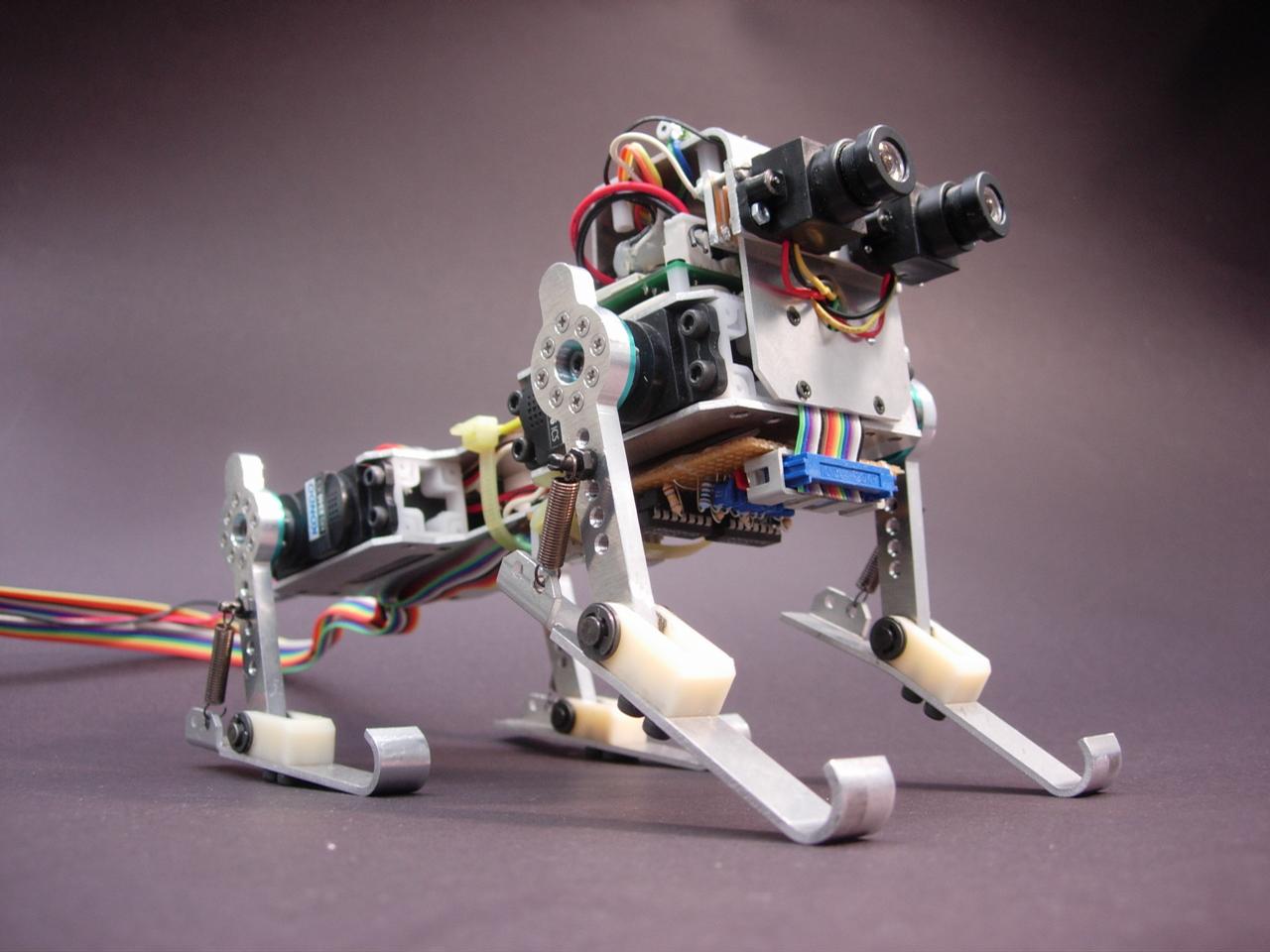
 Puppy Video |
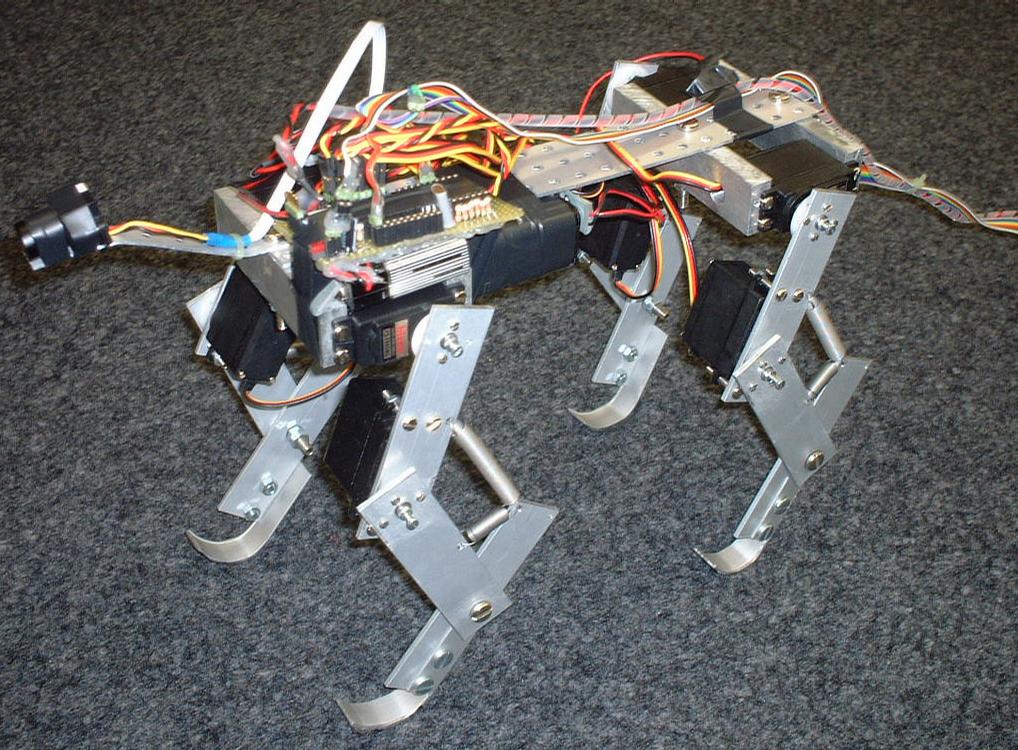
 MiniDog6m Video |
 Running Robot Video |
 MiniDog3b Video |
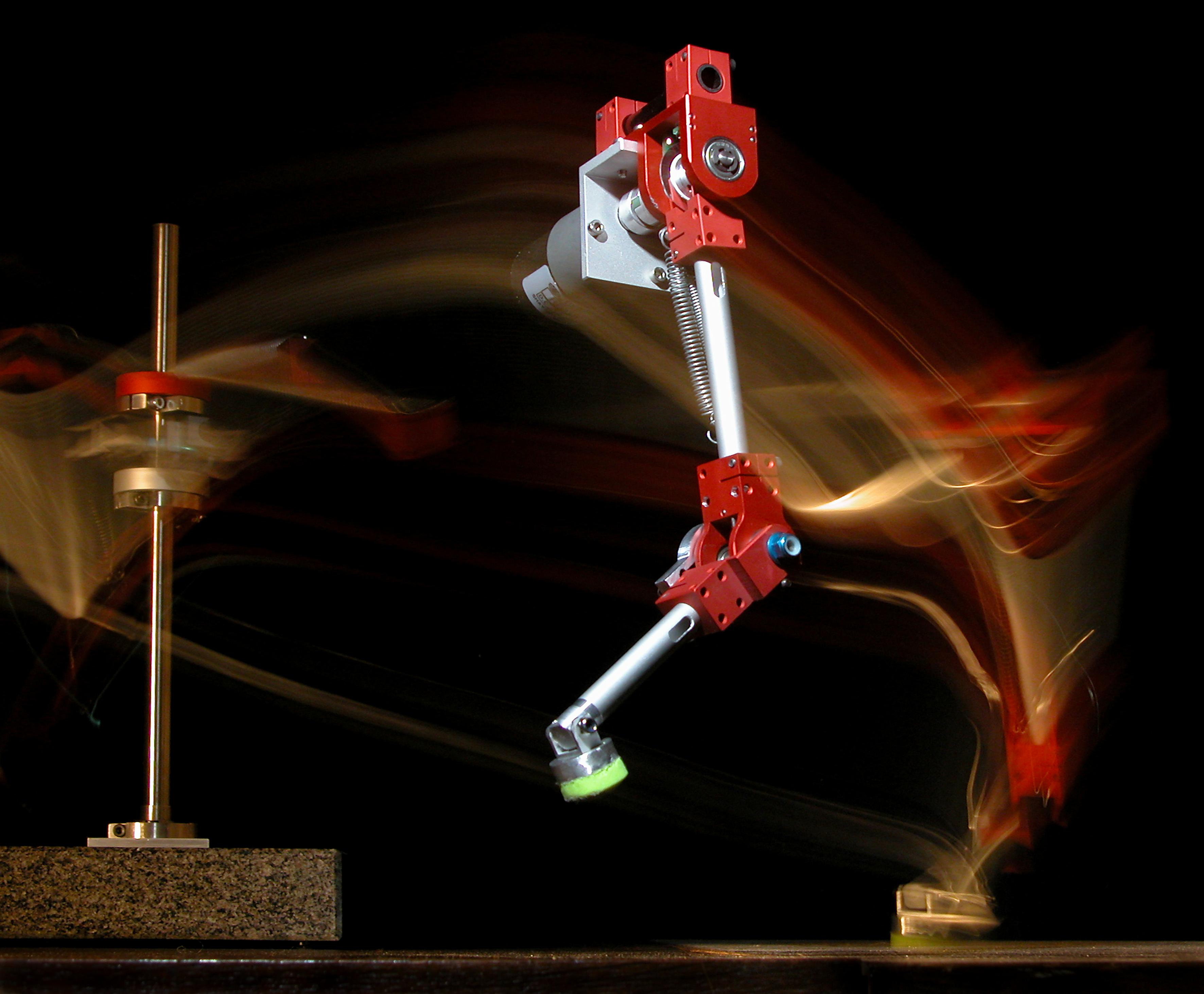
 MIT Monopod Video |
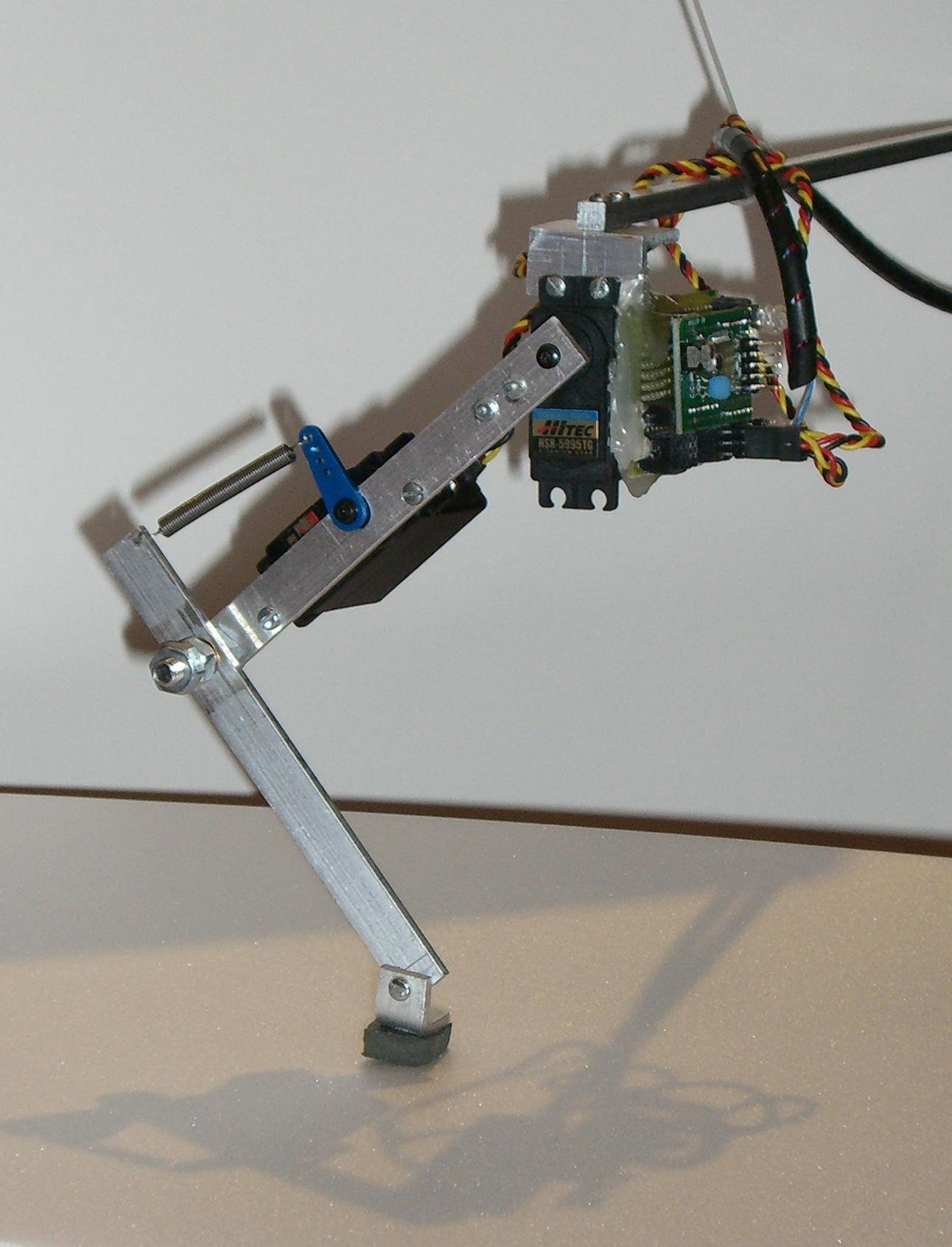
 Bioleg Video |
 MR ESS Video |
 Geoff |
 PogoDog |
 Compass Gait Walker Video |
 Jena Walker Video |
 Stumpy Video |
 Dumbo Video |
 Rabbit Video |
 Monkey Simulation Video |
 Fish Video |
 Mellisa |
 3rd Arm Video |
 Egg Breaker Video |
 Falling Cat Video |
- * Fumiya Iida
- Computer Vision & Robotics Group
- Overview
- Members
- Research
- Teaching
- Publications
- Events and Seminars
- 4th Year Projects
- Postgraduate Applications
- Contact
- Machine Intelligence Homepage