Difference: FI224_Research (1 vs. 7)
Revision 7
26 Jun 2014 - pr374
| Line: 1 to 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
Dr Fumiya Iida, Department of Engineering | ||||||||
| Line: 26 to 26 | ||||||||
|
III. Vision-based active sensing: PLOS ONE IV. Robotics education: ARSO 2013 (in press) Media coverage: Daily Mail, NBC News, Popular Science, New Scientist, RSI Channel, IEEE Spectrum, ETH Globe Magazine | ||||||||
| Changed: | ||||||||
| < < |
Videos: Continuous dragline formation, assembly | |||||||
| > > |
Videos: Continuous dragline formation, assembly | |||||||
|
| ||||||||
| Line: 34 to 34 | ||||||||
|
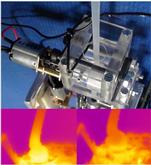
| Description: Developmental robotics is located at the intersection of developmental sciences and robotics. The main goal of this field of research is to investigate how a creature can develop increasingly complex behaviors autonomously. In this particular project we use self-organization principles to develop reflexive behavior in a simulated leg model. Using the same self-organization principles, we have obtained analogues of the myotatic, the reverse myotatic, the reciprocal inhibition, and the withdrawal reflexes, which have been identified in the mammal spinal chord. Researchers: Hugo Gravato Marques Publications: Current Biology, Biological Cybernetics | ||||||||
| Changed: | ||||||||
| < < |
Videos: Reflex Learning and Jumping | |||||||
| > > |
Videos: Reflex Learning and Jumping | |||||||
|
| ||||||||
| Line: 42 to 42 | ||||||||
|
| Description: Variable stiffness and damping mechanisms can increase versatility and efficiency of legged locomotion. This research area focuses on the development of lightweight, powerful and simple variable actuators. A number of different methods and materials are explored in the development process of legged robots such as carbon fibers and glass fibers for springs, variable stiffness mechanisms, non-linear springs and passive mechanisms as well as brakes and clutches to create multi modal actuators. Researchers: Fabian Günther, Derek Leach Publications: IROS 2013, IEEE/ASME-TMECH, IROS 2012, IROS 2012, AMAM 2011 | ||||||||
| Changed: | ||||||||
| < < |
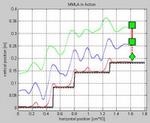
Videos: Preloaded Hopping with ETHop and LMMA, Open loop Hopping with ETHop, Double Pendulum | |||||||
| > > |
Videos: Preloaded Hopping with ETHop and LMMA, Open loop Hopping with ETHop, Double Pendulum | |||||||
|
| ||||||||
| Line: 51 to 51 | ||||||||
|
Researchers: Xiaoxiang Yu, Fabian Günther, Surya Nurzaman Publications: TMECH, ALife, TIE, ICRA 2013, IROS 2012, AIM 2012, AIM 2011, AMC 2012, AMAM 2013, Dynamic Walking 2012, ICMC 2011 Videos: | ||||||||
| Changed: | ||||||||
| < < |
Curved beam robots: Hopper, Walker, Runner Multi-gaited study: simulation, experiment Mini efficient robot: Hopper, Runner Large payload efficient robot: 10kg payload hopper Resonance Vibration, Passive Hopping, Hopper modeling, Curved foot hopper | |||||||
| > > |
Curved beam robots: Hopper, Walker, Runner Multi-gaited study: simulation, experiment Mini efficient robot: Hopper, Runner Large payload efficient robot: 10kg payload hopper Resonance Vibration, Passive Hopping, Hopper modeling, Curved foot hopper | |||||||
|
| ||||||||
Revision 6
26 Jun 2014 - pr374
| Line: 1 to 1 | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Dr Fumiya Iida, Department of Engineering | |||||||||||||||||||||
| Line: 14 to 14 | |||||||||||||||||||||
Ongoing Research Areas | |||||||||||||||||||||
| Added: | |||||||||||||||||||||
| > > |
| ||||||||||||||||||||
Previous Projects | |||||||||||||||||||||




Revision 5
26 Jun 2014 - pr374
| Line: 1 to 1 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Dr Fumiya Iida, Department of Engineering | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Line: 15 to 15 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
Ongoing Research Areas | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Added: | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| > > |
Previous Projects | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| Changed: | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| < < |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
| > > |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||