Ultrasonic elasticity imaging
A special topic in displacement tracking
Introduction
Ultrasound
elasticity imaging (or ultrasound strain imaging, or ultrasound
elastography) is a medical imaging model for the evaluation of the
mechanical properties of tissue. This general paradiam embraces a
wide range of different techniques, the principal distinguishing
factors being how the stress is applied and how the tissue
deformation is measured.
In our group, we focus on the quasistatic
approach to ultrasound elasticity imaging, where tissue deformation
is introduced by pressing on the probe. Two radio frequency (RF)
ultrasound frames are acquired pre and post-deformation. Some
indication of the tissue elasticity is provided by the axial strain,
which is usually retrieved in two steps: displacement
estimation,
by matching pre-deformation RF data windows with post-deformation
windows; and strain
estimation,
by differentiating the displacement field.
Displacement
estimation
Exhaustive search
The simplest
displacement estimation method is probably exhaustive
search.
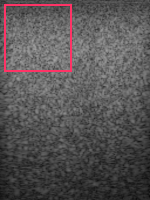
A processing window is defined in the pre-deformation RF frame (Fig.
1(a)) and a search region is defined in the post-deformation RF frame
(Fig. 1(b)). The standard cross-correlation similarity metric can be
used to locate the best match of the processing window in the search
region. The offset from the original window to the best matched
window is the displacement of the window centre point (Fig. 1(c)).
Exhaustive search applies the same strategy to all windows in a RF
frame to retrieve a displacement field (Fig. 1(d)).
|

(a)
|
(b)
|
(c)
|
(d)
|
|
Figure
1. Displacement estimation based on exhaustive search. (a) A
processing window in the pre-deformation RF frame. (b) the
corresponding search region in the post-deformation RF frame. (c)
The estimated displacement is the offset from the original window
to the best matched window. (d) Process all windows in the same
way to retrieve a displacement field.
|
Displacement tracking
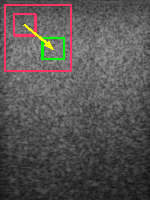
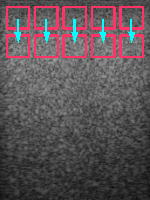
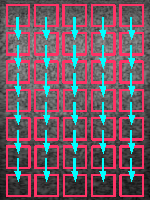
In the
displacement tracking approach, only a few windows are searched
within a big search region. For example in Fig. 2(a), windows in the
top row are exhaustively searched. The search region of the 2nd row
of windows are offset by the estimated displacement of the 1st row.
This helps to reduce the search region size of the 2nd row of
windows, since after position offset, a search region is roughly
aligned with the corresponding window. In other words, displacement
of the 2nd row of windows are “tracked” from the 1st row
(Fig. 2(b)). Similarity, all subsequent windows keep tracking of the
displacement from a previous row to build up a displacement field.
|
(a)
|
(b)
|
(c)
|
|
Figure
2. Displacement estimation based on top-to-bottom displacement
tracking. (a) Windows in the top row are exhaustively searched.
(b) Displacement of 2nd row of windows are tracked from the 1st
row. (c) Tracking propagates from top to bottom of the whole
frame.
|
The displacement
tracking approach is an improvement upon exhaustive search. It
requires mush less processing time owing to the reduced search
regions and implicitly imposes continuity constraint on the resultant
displacement field. However, there is a special error-propagation
problem associated with displacement tracking, as shown by Fig. 3. In
Fig. 3(a), an arc region is masked by noise, where no valid
displacement can be
retrieved. If displacement tracking is performed from top to bottom,
erroneous estimates start to accumulate in the arc and are passed on
to all the regions below the arc (Fig. 3(b)). On the contrary,
exhaustive search method can retrieve plausible displacement from the
centre of the arc. As each window is processed independently, errors
in the arc do not affect other regions (Fig. 3(c)).
|

(a)
|

(b)
|

(c)
|
|
Figure
3. Error propagation caused by displacement tracking. (a) In the
B-mode image, an arc region is masked by noise. (b) Displacement
filed obtained by tracking from top to bottom of the frame. (c)
Displacement filed
obtained by exhaustive search.
|
Quality-guided displacement tracking
We recently
developed a displacement estimation method called the quality-guided
displacement tracking algorithm. It is capable of tracking around
unreliable estimates and reducing error propagation. Figure 4(a)
shows the axial displacement field of the same data set in Fig. 3(a)
retrieved by the quality-guided displacement tracking algorithm. All
regions except the arc have obtained plausible estimates. The
post-alignment window-matching quality field is shown in Fig. 4(b).
It is based on this quality map that the tracking path propagates. A
video of the tracking progress is shown in Fig. 4(c), which can be
played with Windows Media Player Plug-In. The tracking starts from
several windows at different places (we call them seeds). It
propagates the whole frame in a quality descending order, such that
highly matched windows render their neighbours being processed
earlier and poorly matched windows delay the processing of their
neighbours. This strategy ensures that when tracking paths encounter
the arc region, they are paused. Only after surrounding higher
quality regions are finished, do the tracking paths enter the arc. In
the arc estimation errors are inevitable but they will not affect
other regions.
|

(a)
|

(b)
|
|
|
Figure
4.(a) Axial displacement field retrieved by the quality-guided
tracking algorithm. (b) Post-alignment window-matching quality
field. (c) Tracking progress.
|
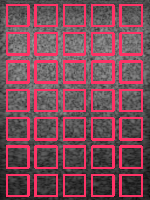
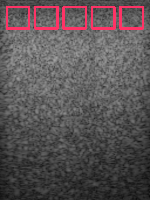
In Figure 5. a
video illustration shows how exactly the quality-guided tracking
algorithm works. Each cell on the video image represents a processing
window. The number in a cell represents the matching quality of that
window. At the initial stage, there are 3 seeds: red, green, and
yellow; and they obtain displacement estimates and matching quality
by exhaustive search. The tracking algorithm is responsible for
deciding which is the next window to process. The governing rule is:
the next window to processe is always a neighbour of a processed
window that has the highest quality value. In this example, a
neighbour (does not matter which neighbour) of the green window will
be processed. After all neighbours of the green one are finished, the
red window's quality becomes the global maximum. So a neighbour of
the red will be processed and so on and so forth. Note, any neighbour
of the yellow window will not be processed until the global maximum
quality drops to 0.3 or until it is propagated from other seeds.
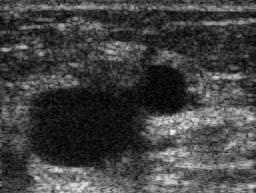
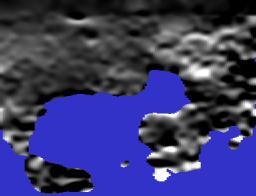
Figure 6 shows a
breast scan that captures a cyst. Tissue displacement estimates
inside the cyst are unreliable due to the lack of ultrasound wave
scatters.
|
(a)
|

(b)
|

(c)
|
|
(d)
|

(e)
|
|
|
Figure
6. B-mode image of a breast scan. Axial displacement field
retrieved by (b) tracking along A-lines, and (c) the
quality-guided tracking algorithm. (d) Strain image based on (c).
The blue colour wash out data that are below a quality threshold.
(e) Quality map. (f) Quality-guided tracking progress.
|
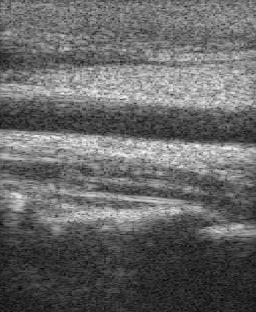
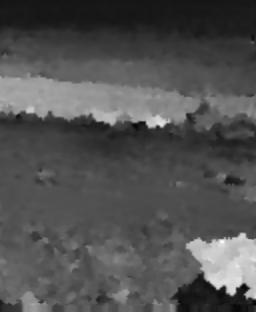
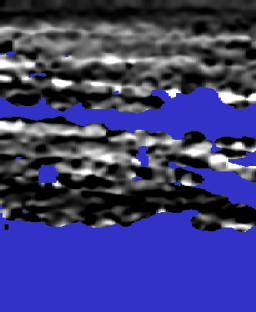
Figure 7 shows an
artery scan. There are two challenges to displacement estimation.
First, the artery was pulsating during the scan and created a
discontinuous displacement field above and below the artery. Second,
two high quality regions are separated by the artery and they must be
independently tracked.
|
(a)
|

(b)
|
(c)
|
|
(d)
|

(e)
|
|
|
Figure
7. B-mode image of an artery scan. Axial displacement field
retrieved by (b) tracking along A-lines, and (c) the
quality-guided tracking algorithm. (d) Strain image based on (c).
The blue colour wash out data that are below a quality threshold.
(e) Quality map. (f) Quality-guided tracking progress.
|
Last updated: January 2009